
Caves on Earth form by a variety of processes. Volcanism can leave behind lava tubes or gas-inflated chambers, fluid dissolution hollows out caverns in subterranean rock, and wind and weather can mechanically erode cliff or seaside caves, for example. Because many of these same processes operate on other planetary bodies in our solar system, it’s likely that at least some of these bodies host their own caves.
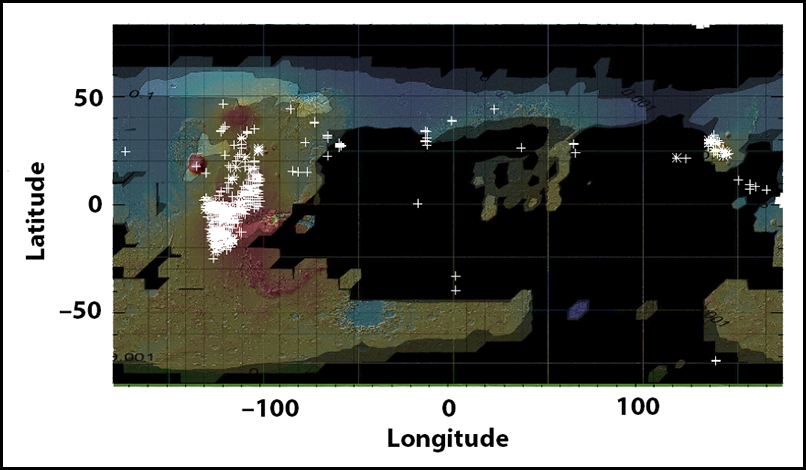
To date, more than a thousand possible cave entrances have been identified on Mars, and hundreds have been resolved on the Moon using high spatial resolution cameras such as the Mars Reconnaissance Orbiter’s High Resolution Imaging Experiment (HiRISE) and the Lunar Reconnaissance Orbiter Camera (LROC). Meanwhile, other identified subterranean access points include two cryovolcanic vents on Pluto; ice fissures on the moons Enceladus, Europa, Titan, and Triton; and several conspicuous holes at the bottoms of impact craters on Mercury.
Off-world caves present a new frontier for planetary science, subsurface astrobiology, geology, and human exploration. We just need the capability to identify and observe them.
In fact, most rocky or icy planetary bodies in the solar system probably have caves. These features present a new frontier for planetary science, subsurface astrobiology, geology, and human exploration. We just need the capability to identify and observe them.
Last February, 55 terrestrial and planetary scientists and robotics and instrumentation engineers, as well as 16 students, gathered in San Antonio, Texas, for the Third International Planetary Caves Conference, the fourth in a series of meetings focusing on the science and exploration of planetary caves. (The first such meeting, held in 2008, was called “Lava Tubes: Earth, Moon, Mars.”) Conference participants discussed the state of the art in relevant science and engineering capabilities related to planetary cave exploration and research.
Here we summarize these discussions, which covered cave formation mechanisms, preserved geological records, cave microclimates and astrobiological potential, engineering challenges of subsurface exploration, and potential robotic mission concepts to explore the subsurfaces of other worlds, particularly the Moon and Mars.
Caving from a Distance
Meeting participants focused much of their attention on the distribution and characteristics of caves on the Moon and Mars—the most-explored bodies in the solar system (other than Earth, of course)—as well as on plans under way to explore caves on these bodies through data returned from current, upcoming, and potential future missions.
Cave entrances on the Moon, for example, are ideal places to access rare, pristine bedrock sequences that expose the geologic history of episodes of lunar volcanism and production of regolith (unconsolidated rocky matter lying atop the bedrock). Lunar caves are also of interest because they may offer havens for future human exploration and habitation. One cave entrance, located in a broad lava plain between the Apollo 11 and 17 landing sites, is an especially tantalizing target for exploration, as it features both a deep exposure of rock strata and a confirmed cave that extends at least 20 meters back from the entrance (Figure 1).

On Mars, caves likely serve as repositories for records of past Martian climate and the history of water and other volatile materials on the planet, based on our experience with caves on Earth. These climate records could include the presence of hoarfrost, stalactites, stalagmites, or alteration minerals. Because caves provide a protective buffer from radiation and the climate extremes of the surface, they are also excellent sites to search for signs of life, both extant and extinct, which is the major focus of current and planned exploration efforts on the planet.
Establishing whether a specific artifact or process is evidence of living organisms may be difficult without additional context provided by habitability studies.
There are many challenges associated with detecting life in the subsurface, however. For example, as is typical on Earth, establishing whether a specific artifact or process is evidence of living organisms may be difficult without additional context provided by habitability studies. Like terrestrial caves, Martian cave deposits may contain a continuum of abiotic and biotic organic components, making it difficult to establish whether these components were generated by living organisms.
A variety of methods, including pattern recognition algorithms; infrared spectroscopy; and ultraviolet (UV), Raman, and fluorescence spectroscopy and microscopy, may facilitate the search for life elsewhere. Cameras, particularly microscale imaging cameras, can image biofilms and biovermiculations when coupled with pattern recognition algorithms during data processing.
Not all chemical analysis techniques require collecting physical samples: A light beam and sensors to collect the reflected photons are sufficient. Infrared, UV, Raman, and fluorescence spectroscopy can identify organics that may be indicative of life or life-related processes. These techniques can also identify minerals (iron oxides, carbonates, etc.) that may indicate life or life-related processes when they are found close to organic chemicals. Additional techniques such as mass spectrometry could be brought to bear if the mission architecture incorporated a sample ingestion system, but this adds cost and complexity to the mission. Convincing detections of life within planetary caves (or other environments) will require multiple lines of evidence from several of the techniques just mentioned to help distinguish materials created by biotic versus abiotic processes.
Robotic Exploration
Exploring caves is a difficult task on Earth, let alone on another world. This was demonstrated by a field trip during the meeting to Robber Baron Cave, an unmodified natural cave in San Antonio with laterally and vertically expansive branching and intersecting tunnels. The difficulty attendees had in navigating through the labyrinthine cave network emphasized that real-time, in situ mapping combined with autonomous navigation would be required for any robotic mission to a similar extraterrestrial site.
Indeed, there are many hurdles for robotic exploration in planetary caves. Challenges identified so far include the development of technology for accessing cave entrances and moving satisfactorily over extreme terrain; for communicating back to Earth; and for power generation, transmission, and storage. Instrumentation customized for particular robotic platforms and planetary environments must be designed, including technology that allows for perception of obstacles and 3D localization in the dark. There are also difficulties related to light-time delays in communication—the time lag between when a message is sent from the control center on Earth and when a rover or other robotic craft receives it—which increases the likely need for autonomous navigation.
Significant advances being made for Earth applications, such as tools for robotic cave search-and-rescue operations and autonomous mine and tunnel mapping, are addressing some of these challenges. It’s clear, however, that various new approaches and technologies will be needed to robotically explore planetary caves. Approaches mentioned during the meeting ranged from lowering instrument packages into caves via tethers (much like rappelling into a cave) to crawlers that can scale near-vertical slopes and even the use of autonomous-navigation flying drones.
Earth Caves as Analogues
When future opportunities to explore off-Earth caves arise, we will need to be prepared.
When future opportunities to explore off-Earth caves arise, we will need to be prepared, considering the large investments of funding, time, and other resources needed for such ambitious missions. This preparation includes thoroughly testing equipment and instrumentation—as well as people and processes—under conditions as realistic as possible.
Scientists have long used environments on Earth as analogues for extraterrestrial settings (Table 1), and today there are programs relying on terrestrial caves to similar effect. NASA’s Biologic and Resource Analog Investigations in Low Light Environments (BRAILLE) project, for example, is using terrestrial caves located at Lava Beds National Monument in Northern California. The project used a modified version of the NASA Ames CaveR testing rover, commanded remotely to simulate a planetary mission, to map and study a 20-meter stretch inside Valentine Cave. CaveR used imaging and spectroscopy to accomplish both mapping and science. Among other outcomes, the BRAILLE project has demonstrated the high level of coordination necessary between robotic technologies, remote operators, and appropriate instrumentation that is needed to accurately identify biosignatures.
Table 1. Cave Classification by Processa
| Cave Type | Dominant Process | Examples on Earth | Other Potential Locations |
| Solutional | solvent dissolves rock | karstic caves (e.g., halite, gypsum, carbonate) | Mars, Titan, Ceres |
| Erosional | mechanical abrasion by wind, water, grinding, etc. | sea caves, aeolian rock shelters | Mars, Venus, Titan |
| Tectonic | fracturing from internal or external Earth movements | tectonic caves | Moon, Mars, Titan, Europa, Enceladus, Ganymede, Vesta |
| Suffosional | construction by fluid-borne particle loss | mud caves, thermokarst | Mars |
| Phase transition | melting, vaporization, or sublimation | lava tubes, glacial caves, ice caves (i.e., ice in bedrock) | Moon, Mars, Venus, Io, Vesta, comets |
| Constructional | negative space left by biological or accretional processes, often around erodible template | coralline algae towers, travertine spring mound caves | Mars |
aModified from Boston [2004].
Terrestrial caves also provide opportunities to train astronaut teams and scientists who might one day control robots exploring planetary caves. Because caves constrain human mobility and communication, these features can be used to approximate the living and working conditions on a space station. Terrestrial caves also provide science-rich environments in which realistic data collection can be carried out in confined and challenging surroundings. In these unfamiliar environments, teamwork and coordination become even more necessary to accomplish tasks.
Human Exploration and Resource Utilization
Caves may ultimately be used as astronaut outposts, which will require specialized technology and construction to make them viable for human use.
In addition to future robotic exploration, another topic of discussion at the meeting was the potential for human exploration and habitation on other planetary bodies. Caves may ultimately be used as astronaut outposts, which will require specialized technology and construction to make them viable for human use. A field trip to Natural Bridge Caverns, a commercial show cave with extensive paved pathways and staircases, provided a good example of interior modifications relevant to future human use of extraterrestrial caves. Additional modifications, like inflatable and hybrid inflatable human habitats, could provide atmospheric pressurization within a cave environment. Current spacesuits are bulky and are not designed for conducting science operations within a confined area, such as a cave, and inflatable habitats could allow astronauts to move around more freely.
Ferrying large amounts of supplies through space is extremely costly, so such exploration efforts may well rely on using native, life-sustaining resources available on other worlds. Such resources include underground water ice deposits potentially present in lunar and Martian caves (Figure 2). Astronauts could use water from these deposits for drinking. They could also use electrolysis to split the water into hydrogen and oxygen; hydrogen could be used for fuel, and oxygen could be used for humans to breathe.
Regolith might also be used as in situ building material. Regolith could be refined for mineral extraction, to retrieve ores containing thorium, titanium, and iron, for example. Or it could be used as raw material for 3D printing of construction materials.
Steps for the Next Decade
Multiple planetary cave mission concepts are at various stages of development and may be considered for further implementation through competitive selection processes within the next decade. For example, Moon Diver, a finalist for NASA’s Discovery Program, would “rappel” into a lunar pit. Limbed Excursion Mechanical Utility Robot (LEMUR) is a terrestrial prototype for a rock-climbing robot that could be used for future planetary cave exploration. Mars Astrobiological Caves and Internal Habitability Explorer (MACIE) is an example of a mission concept that would explore a Mars cave and look for evidence of life.
Conference participants agreed that a practical approach to planetary cave exploration involves development of technologies on Earth, spaceflight demonstration (when possible) in the nearby environment of the Moon—so transportation timing and communication lags are minimized—and then application to missions requiring higher levels of robotic autonomy on Mars and beyond.
Many of these ideas will be presented in a decadal survey white paper on planetary caves. This white paper was developed largely by conference attendees and was submitted earlier this year to the National Academy of Sciences.
Acknowledgments
We thank Southwest Research Institute for hosting the conference and the Lunar and Planetary Institute for logistics and program support. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. government.
References
Boston, P. J. (2004), Extraterrestrial caves, in Encyclopedia of Caves and Karst Science, edited by J. Gunn, pp. 355–358, Fitzroy Dearborn, London.
Cushing, G. E. (2017), Mars Global Cave Candidate Catalog Archive Bundle, U.S. Geol. Surv., Reston, Va., astrogeology.usgs.gov/search/map/Mars/MarsCaveCatalog/mars_cave_catalog.zip.
Williams, K. E., et al. (2010), Do ice caves exist on Mars?, Icarus, 209(2), 358–368, https://doi.org/10.1016/j.icarus.2010.03.039.
Author Information
Timothy Titus ([email protected]), U.S. Geological Survey, Flagstaff, Ariz.; Charity M. Phillips-Lander, Southwest Research Institute, San Antonio, Texas; Penelope J. Boston, NASA Ames Research Center, Moffett Field, Calif.; J. Judson Wynne, Department of Biological Sciences, Northern Arizona University, Flagstaff; and Laura Kerber, NASA Jet Propulsion Laboratory, California Institute of Technology, Pasadena
Citation:
Titus, T., Phillips-Lander, C. M., Boston, P. J., Wynne, J. J., and Kerber, L. (2020), Planetary cave exploration progresses, Eos, 101, https://doi.org/10.1029/2020EO152045. Published on 01 December 2020.
Text not subject to copyright.
Except where otherwise noted, images are subject to copyright. Any reuse without express permission from the copyright owner is prohibited.