
December 2018, Slovenia: A team of scientists, engineers, and technicians from a consortium of universities, organizations, and companies across Europe boldly prepare a robot to go where no robot has gone before.
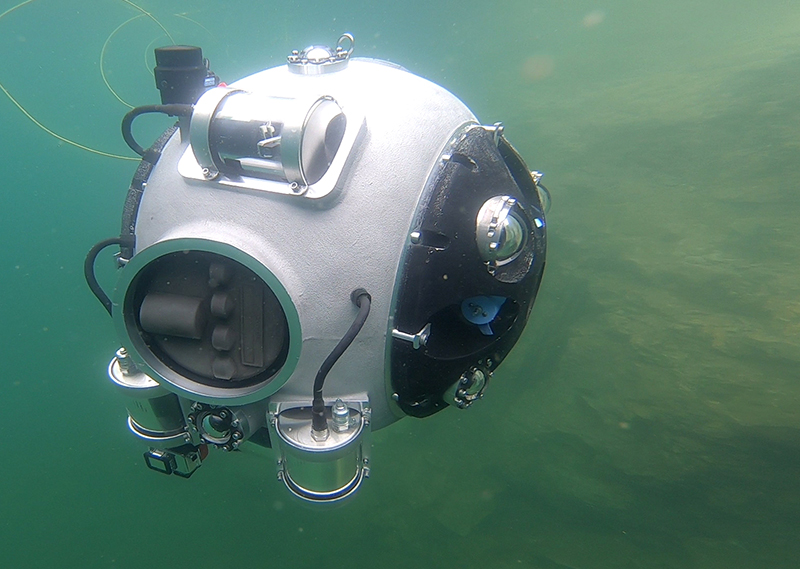
The robot, UX-1, is prepped to enter and navigate the narrow, flooded passages of the Idrija mercury mine in western Slovenia. It’s a field test—UX-1’s second—to determine whether the robot can autonomously navigate the dark, murky waters of the closed mine and use its multispectral camera to recognize different minerals.
UX-1’s creators hope that one day it will be part of a multirobot platform called the Underwater Explorer for Flooded Mines (UNEXMiN) and be used for “non-invasive [and] autonomous 3D mine mapping for gathering valuable geological, mineralogical and spatial information…that cannot be obtained by any other ways, without major costs,” according to the project’s website.
UNEXMiN is just one example of several efforts across Europe, and the world, to develop robots and related technology for use in and around mines to perform a variety of tasks—from mapping flooded passages to analyzing mineral concentrations and from increasing operational efficiency to ensuring the safety of people who work in the mining industry.
Exploring Flooded Mines for “Rare” Minerals
Part of the UNEXMiN project includes identifying closed or abandoned mines in Europe that are now flooded. So far, the Inventory of Flooded Mines lists more than 8,500 such sites. A major thrust for exploring these flooded mines comes from the European Union’s policy on raw materials, which has a goal of “fostering [a] sustainable supply of raw materials from European sources.”
Using UNEXMiN, researchers hope to be able to “re-evaluate [these] abandoned mines for their mineral potential, with reduced exploration costs and increased investment security for any future mining operations.”
Using UNEXMiN, which is funded by a European Union program called Horizon 2020, researchers such as Norbert Zajzon, a geologist at the University of Miskolc in Hungary, hope to be able to “re-evaluate [these] abandoned mines for their mineral potential, with reduced exploration costs and increased investment security for any future mining operations.”
One reason to revisit old, abandoned mines is that “many newer technologies need different [mineral] elements,” Zajzon says. Minerals that may not have been valuable or useful in the past may be indispensable for some modern industries.
Take, for example, a set of minerals called the rare earth elements. These are a set of 15 (to 17) metals that usually occur in the same ore deposits and are not particularly rare—they are just dispersed throughout Earth’s crust and occur in deposits only rarely at high concentrations.
Over the past few decades, global demand for rare earth elements has skyrocketed. Several are an integral part of many modern technologies, including smartphones and some kinds of computer hard drives; light-emitting diodes (LEDs) that power flat-screen TVs, computer screens, and electronic displays; and defense and clean energy systems, such as wind turbines and hybrid vehicles.
Since the 1990s, China has produced between 85% and 95% of the global supply of rare earth elements. In 2009, China announced curbs on exports of rare earth elements (citing domestic needs), which, combined with an unrelated political standoff with Japan in 2010, resulted in skyrocketing prices. It was around this time that the European Union developed its policy of exploring and developing domestic sources of minerals, including rare earth elements.
Challenges Exploring Abandoned Mines
Determining which flooded mines may contain deposits of rare earth elements or other valuable minerals is a big challenge, Zajzon says. It would be incredibly dangerous for human divers to enter, navigate, and explore the flooded tunnels and murky waters. It’s also a complicated and lengthy process to design a robot that can successfully do so.
Among the many difficulties associated with exploring flooded mines are having to navigate in confined spaces with extremely limited visibility and the need to pack a lot of instrumentation into a relatively small robot; for example, UX-1 is a sphere about 0.6 meter in diameter.
Also, “if something goes wrong, you can’t just abort the mission,” Zajzon says. “In other underwater scenarios—such as in deep-sea mining—you can just let the robot surface, but you can’t do that in a mine!”
To overcome the many challenges of operating in flooded mines, the robots designed as part of UNEXMiN “will employ components such as acoustic cameras, SONAR (Sound Navigation And Ranging), thrusters, laser-scanners, a computer, rechargeable batteries, pendulum, buoyancy control system and a protective pressure hull,” write UNEXMiN researchers in a recent paper. These components make up different subsystems, including a propulsion system, a power supply system, a computer system (especially critical because the UNEXMiN robots are designed to be autonomous), and a scientific system with which the robot will be able to take spectral readings of the mine environment and collect water samples.
Building and testing the robot are a highly iterative process.
Building and testing the robot are a highly iterative process, Zajzon says. “First, we built the robot in plastic, then we tested whether a spherical robot could be maneuvered with the thrusters we had. With those results, we proceeded to test the software, first without water, then with water, then with different sensors, and so on.”
The first field trial for the UX-1 robot took place in June 2018 in the Kaatiala mine in western Finland. At that point, the robot was still remotely controlled, but it was successful in submerging itself and identifying minerals from a test array of mineral samples.
During the trial at the Idrija mine in December 2018, the robot performed an autonomous dive for the first time and was able to use its multispectral camera to identify minerals in the water.

Staying Connected for Safety
In addition to exploring and mapping flooded mines, robots are also being designed to make mines safer. In the United States, about 1,000 people die in mines each year. Accurate numbers are more difficult to find in a global context, but some sources estimate that up to 12,000 miners die each year in mining accidents, mostly in coal mines.
“When there is no one in a mine, no one can be injured or killed,” says Helmut Mischo, chair of underground mining methods at Freiberg University of Mining and Technology in Germany. Mischo is part of a multi-institution team that is working to combine robotics and the “Internet of Things” through an initiative called ARIDuA, or autonomous robots and the Internet of Things in underground mining.
“Robotics and the [Internet of Things] have a synergistic relationship: on the one hand, robots can profit from IoT infrastructure,…and on the other hand robots can help to install IoT infrastructure.”
The Internet of Things (IoT) refers to interconnected networks of devices, appliances, or systems that can communicate with each other and exchange data and information. According to the ARIDuA website, “robotics and the IoT have a synergistic relationship: on the one hand, robots can profit from IoT infrastructure, e.g. by using sensor data for better navigation, and on the other hand robots can help to install IoT infrastructure.”
An example of an IoT system within a mine would be networked sensors that monitor the mine environment and provide early warnings for dangers, such as gas leaks. When a leak is detected, miners can be evacuated. Robots can be sent in to investigate the leak and explore possible options. The same network that connects the networked sensors can also be used to communicate with and control the robot if it’s not autonomous.
One challenge in developing and maintaining an IoT infrastructure within mines is that the mine environment is always changing and expanding, Mischo says. “In a typical factory, the machinery, workstations, and production lines are all stationary, and data, such as electricity and water consumption, can be gathered and processed relatively easily,” he says. But everything changes in a mine.
“Mines are expanding continuously, and the work environment changes constantly. Any network being used in mines needs to reinvent itself constantly as the environment changes, which again highlights how a mobile robot, which can expand and maintain the network, and the IoT can work together.”
Mischo and his colleagues currently are testing the combination of robotics and IoT at the Reiche Zeche Living Mine, a research and training mine at the Freiberg University of Mining and Technology. Having access to an underground environment is key, Mischo says, because “progress in the surface environment is helpful but not always directly comparable to the underground, irregular, and confined spaces in mines.”
At the teaching mine, researchers are testing a mobile robot called Julius and a sensor network that can track people, robots, and machines in the mines as well as monitor environmental conditions. Ultimately, the goal is to make mines safer, using a combination of technology and human labor.

Research Across the Globe
Researchers in other parts of the world are also investigating ways that robots can help make mining safer and more efficient. For example, at the Colorado School of Mines in Golden, Hao Zhang, Andrew Petruska, and colleagues are exploring ways that humans and robots can forge effective partnerships in mine environments.
“Current technology is not mature enough to have fully autonomous mines,” says Zhang, a computer scientist at the Colorado School of Mines. “Robots can go into dangerous environments and replace humans there, but final decisions still have to be made by people. People and robots have different skill sets, and we need both to optimize mining operations.”
As a result, Zhang and colleagues are focusing on “human-robot teaming, networking, planning, and human-robot interactions” in the context of mines and other underground environments.
Petruska, a mechanical engineer at the Colorado School of Mines, also highlights the need for teamwork when it comes to robots, humans, and mines. “Computers are very good at some things, such as mathematical stuff and calculations, but not very good at other things that people may find easy,” he says.
In the context of mines, robots often find it very difficult to navigate underground and to understand what other robots and people are doing and how to communicate with those robots and people. So Petruska and Zhang are developing robots that can intuitively gauge human intent, analyze human activities, and determine team intent just by observing.
Corobots, or robots that work alongside humans, are also being developed by researchers at the Council for Scientific and Industrial Research (CSIR) in South Africa. Shaniel Davrajh, a researcher at CSIR, says that a major challenge for the South African mining industry stems from having unique ore bodies at great depths and high inclines.
“The flexibility and adaptability required to implement robotic solutions currently require high-cost solutions which are outweighed by implementing teams of dedicated, focused, and skilled conventional miners. Therefore, we are now focusing on developing technologies that are specifically human-centered, much like corobots in the manufacturing industries,” says Davrajh.
Among the robotic systems being designed at CSIR is a platform that can assist miners during an early examination process of mines. “Currently, miners have to perform visual and acoustic inspections using a pinch bar to identify and remove loose rock that is at risk of falling to the ground. They do this in unsupported environments, which poses a significant safety risk,” Davrajh says.
“There is no ‘silver bullet’ that will save jobs and the future of many [mining] operations….All we are trying to do is provide incremental solutions and gradually increase the arsenal of tools that can help miners work more safely and efficiently.”
The robotic platform is equipped with a set of range finders, thermal imaging sensors, and acoustic systems, all of which are operated with neural networks. The robot can go into different environments and identify potential risk areas before the workforce enters. Much of this work is at the proof-of-concept stage.
Conclusions
Although much progress has been made in developing robots that make mining safer and more efficient, much remains to be done, Zajzon says.
“For example, the UX-1 is an amazing robot, but it’s not a miracle; we cannot fully reopen a mine with the robot as it is today. However, before reopening a mine, we have to explore and make geological measurements, and that can cost a lot of money. That’s where UX-1 can help—the robot can lower the costs of investigating and determining which flooded mines would be economically viable to reopen.”
Davrajh agrees that robotics in mining is not a panacea for the dangers of working in a mine and the challenges faced by the mining industry.
“There is no ‘silver bullet’ that will save jobs and the future of many of the operations in South Africa,” says Davrajh. “All we are trying to do is provide incremental solutions and gradually increase the arsenal of tools that can help miners work more safely and efficiently.”
—Adityarup Chakravorty ([email protected]), Science Writer
This article is part of a series made possible through the generous collaboration of the writers and editors of Earth magazine, formerly published by the American Geosciences Institute.
Citation:
Chakravorty, A. (2019), Underground robots: How robotics is changing the mining industry, Eos, 100, https://doi.org/10.1029/2019EO121687. Published on 13 May 2019.
Text © 2019. The authors. CC BY-NC-ND 3.0
Except where otherwise noted, images are subject to copyright. Any reuse without express permission from the copyright owner is prohibited.