
In 1986, Lake Nyos in Cameroon exploded, jetting water more than 100 meters into the air as roughly 1.2 cubic kilometers of carbon dioxide suddenly belched from the waters. This enormous wave of gas smothered the surrounding countryside, killing more than 1700 people.
The deadly eruption focused attention on the dangers posed by active volcanic crater lakes and the importance of monitoring such lakes for changes in volume and other factors. About 35 such lakes dot the Earth, but monitoring active volcanic lakes can be problematic, especially when they undergo frequent eruptions of steam and other gases. These eruptions can make them too dangerous for human inspection by inflatable boat or raft.
However, the recent burgeoning interest in autonomous aerial drones presents researchers with an opportunity. So we asked ourselves, Could a small, inexpensive, and easily transportable autonomous boat, equipped with sonar, do the job?
A Need to Determine Lake Volume

A key aspect of active volcanic lake research and monitoring is the determination of lake volume, something that can change significantly as geothermal heating and evaporation, steam and gas eruptions, and sedimentation progress. As a result, considerable attention has been paid to determining the depth profile of these lakes.
We designed and built an autonomous boat with that function in mind, using readily available and relatively inexpensive aerial drone components, open-source software, and a retail sonar unit. In total, the equipment used to create the boat cost roughly US$700.
Drone Boat Specs
The autonomous surface vehicle is easily carried in airline baggage or in a backpack across challenging terrain.
Our drone boat, which we dubbed a sonar-ASV (autonomous surface vehicle), has a hull with a catamaran design. Made from acrylonitrile butadiene styrene (ABS) plastic, it measures just 54 × 38 × 22 centimeters and weighs less than 10 kilograms. The ASV is easily carried in airline baggage or in a backpack across challenging terrain.
Because the ASV has to work in highly acidic environments, we couldn’t use a conventional propulsion system with a drive shaft connected to a propeller in the water. The metal shaft would not survive the acidity. Instead, our ASV has an air propeller powered by a battery-driven electric motor.
The boat is surprisingly agile and has a cruise speed of 0.8 meter per second (3 kilometers per hour), balancing high sonar resolution against minimal mission time.
At cruise speed, the motor draws only 1.6–3.5 amps, depending on wind direction. Keeping the electric current low is important because high currents could lead to excess heating, which could be problematic because the ASV already has to operate in water temperatures of 55°C and higher.
Craft Autonomy
Clouds of fog often obscure the hot lake surface, so the ASV needs to find its way on its own.
From the beginning of the design process, it was clear that the craft needed to be fully autonomous. For one thing, clouds of fog often obscure the hot lake surface, so the ASV needs to find its way on its own. Autonomous navigation also allows us to repeat the same track on subsequent missions if we want to focus on particular features of the lake bottom.
We ended up choosing the open-source ArduPilot system for autopilot navigation. For planning the ASV forays, we used Windows-based Mission Planner software. An Arduino data logger board captured and stored data from the GPS, sonar, and additional sensors (such as temperature).
Costa Rica Test Site
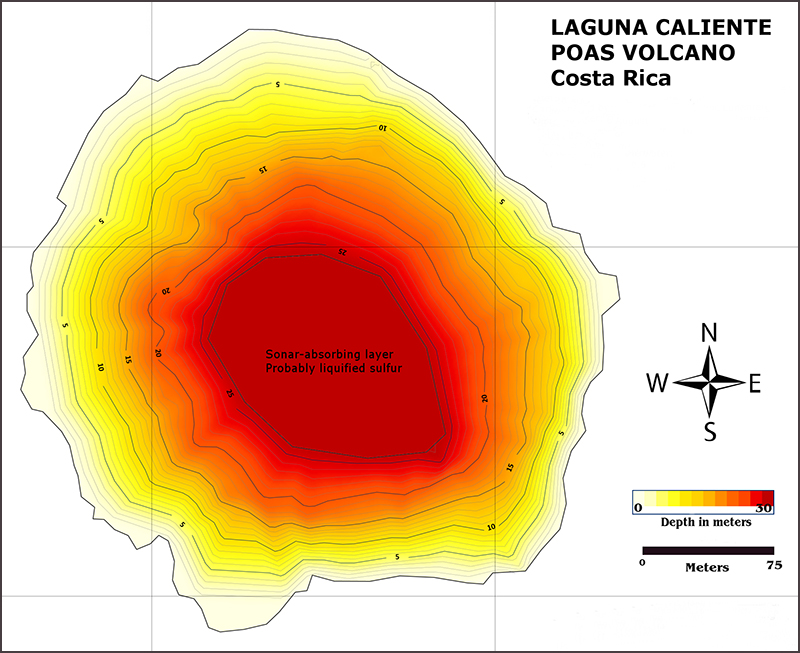
Poás volcano in Costa Rica provided us with an ideal test site. At 2708 meters in elevation, Poás is topped by two crater lakes. The older lake, Laguna Botos, is an inactive, cold-water lake with near-normal chemistry. The other, Laguna Caliente, is a hyperacidic, hot, and very active lake with chemistry that is anything but normal.

We deployed the ASV into Laguna Caliente on 30 and 31 July 2016. During these runs, we recorded a pH of 0.53, roughly 3 times the acidity of battery acid, and a water temperature of 55°C. Moreover, during the course of our fieldwork, the lake experienced small- to medium-sized steam eruptions every 35–45 minutes.
Visibility was also poor. The ASV was rarely visible through clouds of condensation during its Laguna Caliente mission. In total, the device made two runs into the lake, each for about 45 minutes. Fieldwork at the lake took place over 3 days, stretching to 1 August, with the third day reserved for recovery of the vehicle.

Surviving an Acid Bath
Our boat proved remarkably rugged. On 31 July, a nearby steam eruption inundated the roving ASV with hot, highly acidic water. Although the acid penetrated a poorly sealed cable connection and shorted out the telemetry system, the ASV survived, was recovered, and delivered its data.
The eruption took place at the end of the vehicle’s second mission. The vehicle was not operable after its acid bath but has since been rebuilt.
A Valuable Tool
In the end, the ASV missions provided the bathymetric data we needed to map the bottom of Laguna Caliente and thus calculate its volume.
On 13 April, Laguna Caliente erupted, spewing water, steam, and sediment as high as 1 kilometer into the air. As the eruption developed, new ash and incandescent pyroclastics were ejected until at least 26 April, when the activity destroyed a camera operating at the site. These eruption events have completely restructured the lake, and our team hopes to return in the near future for another series of lake surveys.
Such rapid mobilization is possible with inexpensive and easily portable equipment like our ASV. Through custom-built ASVs equipped with sonar and other sensors, scientists can gain a valuable new tool for the exploration and monitoring of remote and hazardous volcanic lakes.
Acknowledgment
Partial funding was provided by the Keck Science Department of the Claremont Colleges.
Author Information
Donald A. McFarlane (email: [email protected]), W. M. Keck Science Department, The Claremont Colleges, Claremont, Calif.; Joyce Lundberg, Department of Geography and Environmental Studies, Carleton University, Ottawa, Ont., Canada; Guy van Rentergem, Koningin Astridstraat, Deinze, Belgium; and Carlos J. Ramírez, Centro de Investigaciones Geofísicas, Universidad de Costa Rica, San Jose
Citation:
McFarlane, D. A., J. Lundberg, G. van Rentergem, and C. J. Ramírez (2017), An autonomous boat to investigate acidic crater lakes, Eos, 98, https://doi.org/10.1029/2017EO073409. Published on 05 June 2017.
Text © 2017. The authors. CC BY-NC-ND 3.0
Except where otherwise noted, images are subject to copyright. Any reuse without express permission from the copyright owner is prohibited.