
A mountain bike scrambling across rough terrain is a common sight in many areas. Seeing one equipped with a magnetic sensor and other gear doing the same thing, however, may cause you to do a double take.
A team of researchers from the University of Haifa and the Geological Survey of Israel has designed such a sensor-equipped mountain bike. The setup holds promise to improve ground data collection for regional mapping.
Although walking with a magnetic sensor may be the cheapest and most widely used method of collecting field data, riding a sensor-equipped bicycle offers significantly more efficient data collection while maintaining data quality and lowering costs considerably.
Measurements of ground magnetism are an important component of mapping the distribution of magma pools and other magnetic features beneath the surface. To obtain such data, a surveyor typically walks along a planned route carrying the necessary sensors, often in a backpack.
The measured magnetic values are used to create maps of subsurface magnetism. Further modeling produces a three-dimensional distribution showing where magnetic bodies lie beneath the surface. Combined with other data, the distribution of these bodies can be used as the basis for advanced modeling of lateral stress variations and seismic wave propagation in the subsurface. Such measurements are used for calculating earthquake propagation and hazard assessments.
A researcher collecting magnetic measurement on foot can typically cover 10 to 12 kilometers in a day. Although this remains the cheapest and simplest method for traversing almost all types of terrain not covered by roads, the method has its limitations.
For example, very few of the surveyors have the endurance of a marathoner: They often become tired after walking a distance of 2 to 3 kilometers while carrying the instruments.
To cover longer distances, at least two or three surveyors go out to collect data. One surveyor walks a segment, and the others follow along in a car. When the walker tires, another surveyor takes over and walks the next segment. Every segment of measurement is planned according to the topography to maximize time spent going downhill. This method requires funding to cover paying one or more additional persons, renting a large enough car to accommodate everyone, and paying for food and lodging because, normally, a measurement campaign takes more than 1 day.
The Search for Off-Road Magnetic Mappers
How do we ease the burden of all this walking? One solution involves placing sensors on a nonmagnetic cart that can be dragged by a vehicle operated by remote control or programmed to operate autonomously. Such devices have proved useful for detecting, for instance, unexploded mines, but they are limited to roads or fields accessible to the cart.
Aerial surveying overcomes such challenges. It provides dense data coverage over a wide swath and allows mapping of areas inaccessible to ground measurements. However, the technology and support required for aerial surveys are sophisticated, expensive, and beyond the means of many developing nations.
Bicycle-mounted magnetic sensors are potentially suitable for use in remote areas and developing countries.
However, bicycle-mounted magnetic sensors provide an efficient, economical, low-tech design that maintains data accuracy. The new design is potentially suitable for use in remote areas and developing countries.
While collecting data on the bike, we need only one driver and one rider. A segment of data collection can be several tens of kilometers long, with no replacement of surveyors along the way. The extra expenses are also smaller than those used by walkers for the car, fuel, food, and accommodation if the measurements take more than 1 day.
In addition, over topographically flat regions, the rider does not need the technician or the accompanying car at all. This gives the rider more uninterrupted stretches of time to collect data.
Equipping a Mountain Bike
We fixed the components of the magnetometer system to an aluminum-framed, hard-tail mountain bike. We used a design called the All-Terrain Bicycle Geomagnetic Mapping System (ATBGMS), created by researchers from the University of South Florida. In ATBGMS, the magnetic sensor is fixed to a pole extending about 1.3 meters in front of the bike handlebar and turns along with the handlebars [La Femina et al., 1998].
This design worked well on paved roads and relatively smooth dirt roads. We could also easily carry the bike over obstacles such as fences and stairs.
However, the ATBGMS design was not robust enough to support the weight of the magnetic sensor over rougher terrain. Stresses on the equipment bent the handlebar and broke the front pole, dropping the magnetic sensor to the ground.
Designing a New Prototype: Bike-Mag
Our solution to the problems we encountered with ATBGMS was to make the sensor mounting more robust, using a set of polypropylene pipes assembled into a framework of vertical triangles. Anchored to the bike frame, this new framework placed the sensor at a fixed height above ground (2.2 meters), 1.65 meters in front of the handlebar.

In the new design, the sensor does not turn along with the handlebars but remains aligned with the bike frame and the direction of motion during measurements. At the same time, the framework is flexible enough to absorb shocks at a wide range of velocities during a ride.
Our “bike-mag” design has several advantages. The location of the sensors on the framework rather than on the handlebar gives the rider more maneuverability. Moreover, the robustness and flexibility of the polypropylene framework extend data collection to rougher terrain, such as dirt roads, single tracks, and footpaths along uphill and downhill slopes.
Testing the Bike-Mag
We tested the accuracy of our bike-mag system by comparing data collected on foot along a 2-kilometer stretch of flat dirt road between agricultural fields with corresponding data collected using the bike-mag system.
Both sets of measurements used an Overhauser magnetometer (GEM GSM-19) with the same instrumental sample rate (once per second). Both surveys followed exactly the same path. The walker (the author) collected data at a pace of 5 kilometers per hour, and the cyclist (also the author) collected data at 15 kilometers per hour. The surveys were conducted within an hour of each other to eliminate possible external effects such as diurnal changes in the magnetic field.
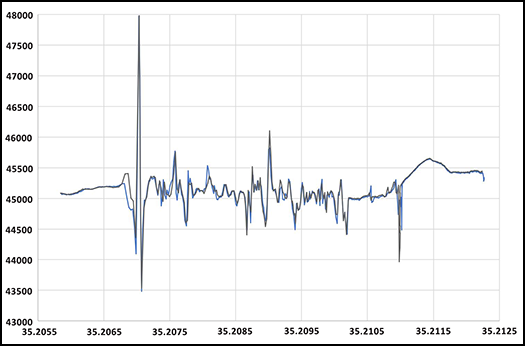
The measurements resulting from the two trial surveys were almost identical. The spikes in the plotted curves coincided, confirming the presence of buried pipes and trenches evident under the road.
The spikes themselves, however, appear smaller in the bike-mag results. The higher velocity during bike measurements increased the distance between sampling points, smoothing out the curve. Indeed, the faster travel rate acted as a low-pass filter that enhanced the signature of magnetic bodies of geological significance over signals from buried infrastructure.
In principle, we could apply a similar adjustment to improve “walk-mag” measurements, but the bike-mag approach allows for continuous acquisition of data over longer distances, with fewer operators, less data storage, and lower processing times.
Mapping a Larger Region
In the second stage of our experiment, we mapped a seismically active region of northern Israel, covering about 2500 square kilometers in a 1- to 2-kilometer grid. Previous walk-mag campaigns, spanning 20 years, had covered an accumulated distance of 900 kilometers.

Our bike-mag mapping started along topographic valleys and included the Dead Sea fault valley. We covered 500 kilometers in 10 days between April and June 2016, and we have since completed data collection over more than 1000 kilometers. Most of the data were acquired at speeds of 15 to 45 kilometers per hour.
A single operator (the author) carried out data collection over gentler topography. In steeper, more rugged terrain, we acquired data mostly during downhill runs. An accompanying vehicle transferred the bike, gear, and rider from the base of one hill to the top of the next one.
Field Work Efficiency
We expected we could map the entire region in about 60 days of field work. Ten days into the effort, it was already clear that our bike-mag approach offered a low-cost, simple, and efficient solution for regional ground mapping, with no more than a minimal investment required for data acquisition, transport of gear, and occasional repairs. We are still in the process of collecting data, and we are making good progress.
For example, measurements along a road descending to the Sea of Galilee, a distance of 14 kilometers, took about 25 minutes. The same distance would have required an entire day of measurements on foot. When one of the polypropylene pipes used to mount the equipment broke, we quickly replaced it with an off-the-shelf pipe from a nearby hardware shop for a cost of about $4.
Public Engagement
People of all ages were intrigued by the strange bike passing through their villages and tried to guess what it might be.
The bike-mag effort also attracted public attention, offering opportunities to engage people with science in practice. People of all ages were intrigued by the strange bike passing through their villages and tried to guess what it might be. Our bike-mag team welcomed this spontaneous curiosity, offering simple explanations, and enjoyed helping bring science and the joy of discovery to local communities.
Racing Ahead
We plan to complete our mapping of northern Israel and then continue on to central and southern Israel, eventually producing a map of the entire country. We intend to combine our measurements with existing data collected from the air and at sea and to reach out for collaborators to map other regions worldwide.
We are in the process of raising more funding for this project. Visit our bike-mag blog for updates on the project’s science, equipment design, and field campaigns.
Acknowledgments
The bike-mag team members are Uri Schattner, Vladimir Lyakhovsky, Amit Segev, and Michael Rybakov. We thank the editor and two reviewers for their helpful comments and Mor Kanari, Tal Golan, and Aya-Shani Schattner for their help during the prototype development. We also thank Moti Schattner and Michael Krom for their constructive remarks.
References
La Femina, P. C., C. B. Connor, and L. Connor (1998), The All-Terrain Bicycle Geomagnetic Mapping System (ATBGMS): A real-time visualization system for geophysical mapping, Eos Trans. AGU, 79(45), Fall Meet. Suppl., Abstract GP22B-04.
Author Information
Uri Schattner (email: [email protected]), Dr. Moses Straus Department of Marine Geosciences, Leon H. Charney School of Marine Sciences, University of Haifa, Mount Carmel, Israel
Citation:
Schattner, U. (2017), A bike built for magnetic mapping, Eos, 98, https://doi.org/10.1029/2017EO071943. Published on 25 April 2017.
Text © 2017. The authors. CC BY 3.0
Except where otherwise noted, images are subject to copyright. Any reuse without express permission from the copyright owner is prohibited.