
“This is impossible” was our first reaction 5 years ago when Shin Sugiyama and I first heard the idea from Naoya Kanna, a postdoctoral scholar at Hokkaido University’s Arctic Research Center in Japan at the time [Kanna et al., 2018, 2020]. What was his “impossible” proposal? Kanna, now a postdoctoral scholar at the University of Tokyo, wanted to deploy oceanographic equipment into the water to study a turbulent glacial plume issuing from the calving front of a Greenland glacier.
If we could make that idea work, our instruments would record the first extended look at the chaotic region where fresh glacial meltwater streams out into the salt water of the ocean. The data would span a few weeks, in contrast to the snapshots from previous expeditions.
Collecting data near a crevasse-riven glacial terminus is challenging for several reasons.
Collecting data near a crevasse-riven glacial terminus is challenging for several reasons. Instruments can disappear or become impossible to retrieve when chunks of ice break from the edge of a glacier. This type of event, called calving, can generate tsunami-like splashes as high as about 20 meters. Ice mélanges, disorderly mixes of sea ice and icebergs commonly seen where glaciers meet the sea, can block access to fjords or tug on cables attached to oceanographic instruments. Adding to the difficulties, anything that is deployed on a glacier’s surface melts out during the summer.
However, as ice loss and discharges of meltwater and sediment from coastal glaciers around the world continue to increase, it is important to understand exchanges of heat, meltwater, and nutrients between marine-terminating glaciers and their surroundings. These factors affect sea level, ocean circulation and biogeochemistry, marine ecosystems, and the communities that rely on marine ecosystems [Straneo et al., 2019].
Unfortunately, the data needed to fill key gaps in our understanding of ice-ocean interactions have been in short supply [Straneo et al., 2019]. This situation is starting to change, however, with the emergence of pioneering new research efforts, including an expedition at the calving front of Greenland’s Bowdoin Glacier in July 2017 in which colleagues and I participated.
The Challenges and Serendipity of Installing Instruments
Our expedition faced its first challenge early on. Because of a 7-day flight delay getting to northwest Greenland, we had only one night to prepare our expedition supplies in Qaanaaq Village (77.5°N) before our chartered helicopter’s scheduled departure. After rushing to collect the necessary food and gear for our week-and-a-half trip, we made our flight the next morning, which took us about 30 kilometers northwest to Bowdoin Glacier on 6 July. We had a lot of work ahead of us in the limited time available, not the least of which involved carrying our geophysical instruments (see sidebar) on our backs to their deployment sites at various locations on and around the glacier.
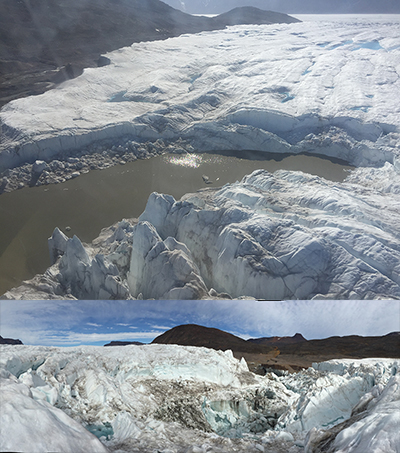
A major crevasse, some 2 meters wide, initially blocked our direct access to the calving front, but the path was cleared after the glacier serendipitously calved a kilometer-scale iceberg on 8 July. We now had access to the fresh 30-meter-high ice cliff, but the evidence, or expression, of the plume on the water’s surface was gone.
Surface expressions of glacial discharge plumes typically appear as semicircular areas of either turbid water of a color different from surrounding seawater or—as was the case upon our arrival to Bowdoin in 2017—water that’s mostly ice free surrounded by sea ice and iceberg-laden water (or sometimes both of these things). These waters provide clear indications of the locations and timing of discharge plumes. Without the surface expression, we could make only an educated guess that the plume should still be there under the water.
Finally, on 13 July, we deployed our oceanographic instrumentation, hanging sensors from the calving front to collect continuous pressure, temperature, and salinity measurements at roughly 5- and 100-meter depths in the salty water of the fjord. Such a feat is trickier than it might sound. As we well knew—and had been reminded of a few days earlier with the large calving event—glacial termini are mobile, treacherous environments. We had to deploy a few hundred meters of cables, instrumentation, and protective pipes at the crevassed calving front, all while trying not to damage the equipment with our crampons and securing each other with ropes. Meanwhile, our Swiss colleagues were remotely operating uncrewed aerial vehicles (UAVs) over the calving front, providing near-real-time safety support and guidance on crevasse development.
Our expedition required more than just down parkas and warm socks. If you take along the following items, you will be all set to study a subglacial discharge plume:
- hundreds of meters of cables connecting a data logger to oceanographic sensors
- four time-lapse cameras
- a seismometer for on-ice deployment
- pressure and temperature sensors
- a conductivity-temperature-depth profiler
- a helicopter
- a boat
- two uncrewed aerial vehicles
- an ice drill, ice screws, and other mountaineering gear
- supporting tidal and air temperature data sets (we got ours from Thule and Qaanaaq, respectively)
- an incredible team
- an unbelievable amount of luck
- a chocolate bar in your pocket
- a bottle of Champagne—chilled in a water-filled crevasse—to celebrate a successful deployment
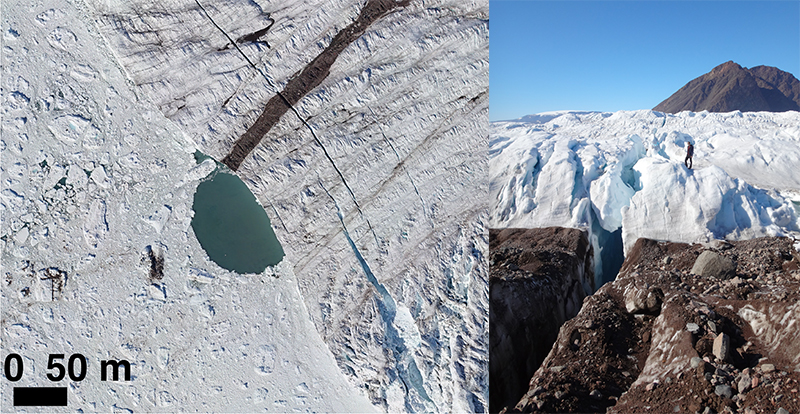
The same evening of the deployment, a strange chain of events started to unfold near our tent camp, 2 kilometers up glacier from the plume. A huge chunk of dead ice (a stationary part of the glacier) collapsed into a large ice-dammed lake and triggered a small tsunami, which displaced the pressure and temperature sensors we had deployed in the lake. The sensors weren’t the only things that moved—the sound of this collapse was so loud that everyone in our camp ran out of their tents to see what was happening.
The next evening, while we were enjoying dinner, we realized that the ice-dammed lake was draining in front of our eyes! The bed of this lake, which had so recently held enough water to fill about 120 Olympic swimming pools, was now exposed. Unlike the simple, idealized glacier lake bed structures used in some models, what we saw in this chasm resembled limestone cave structures: a complex jumble of spongelike features and ponds. We were very fortunate to be present for this event, with all our instruments deployed and collecting data.
Soon after, we got a radio call from Martin Funk, a glaciologist from ETH Zürich (who has since retired) who was working in front of the glacier terminus. Funk, who was encamped with his colleagues on top of a protruding mountain ridge (called a nunataq) in front of the glacier, had a front-row seat for the event. Through binoculars, he saw that the discharge plume had resurfaced right where our oceanographic instruments were set up. The water in the lake had drained under the glacier via the plume we were monitoring. Funk’s team used radar, time-lapse photography, and UAVs to capture as many remote observations as possible. We have since confirmed these observations using analysis of our oceanographic data, time-lapse photographs, UAV images, and a nearby seismometer that recorded the drainage event.
The helicopter retrieved us from the glacier, and we returned to Qaanaaq on 17 July. While we flew along the calving front, I was amazed to see that the cable connected to our deep sensor and its ballast were inclined away from the ice cliff, likely because of the strong current generated by the plume.
Some team members returned to the field area by boat on 1 August, climbing onto and traversing the glacier to collect the data and instrumentation at the calving front. They found the unsupervised cables dangling from a bent aluminum stake. Originally, the stake had been drilled 2 meters into the ice to secure the cables, but by 1 August, it had melted halfway out of the ice. The retrieval was timely: Later that same day, a several-hundred-meters-long section of the terminus near the equipment setup and data logger calved into the water.
Dealing with Difficult Data
Bringing home our hard-earned data set seemed like a major achievement; however, it proved to be just the beginning of our work on this project. The complexity of the retrieved data was a nightmare. Colleagues of ours were eager to plug the oceanographic observations into their models of plumes and subaqueous melt, but we were hesitant to share this unique data set until we could begin to understand it ourselves.
We eventually recognized that our data captured the physical turbulence of water near the calving front of Bowdoin Glacier—this chaotic behavior in fluids has fascinated scientists, including Leonardo da Vinci, for half a millennium. Dealing with turbulence in our data was already a daunting task, but other complications added to the challenge of making sense of it.
For example, the instrumentally observed pressure variations, which represent water depth, indicated that the plume occasionally “spit out” our sensor that had been anchored 100 meters below the surface, pushing it outward from where it had been deployed, and icebergs then pulled it up to the surface. This highly unconventional observation eventually yielded remarkable results. We realized that our sensor was traveling with the turbulent water rather than taking data at a single location as expected, thus producing Lagrangian time series data.

In contrast to previous studies, which obtained infrequent, single profiles of the water column, this time-lapse profiling of the water column documented a dramatic shift in fjord stratification over a span of a few days. For example, on 16 July, a cold layer of water began a 3-day descent, and the water column profile we obtained on 24 July bore no resemblance to conditions just 1 week earlier.
It took a few years of demanding detective work to understand every wiggle in the data recorded during those 12 days of observations and their causal connections with ice–ocean dynamics at the calving front. We learned a lot simply by analyzing the nearly 1 terabyte of time-lapse photography we and Funk’s team had shot. But our main target, the plume, was mostly hiding underwater, obscured by the low-salinity, relatively warm water at the surface near the calving front. Nevertheless, various lines of evidence provided fingerprints of the plume and details of its activity. For example, the seismic records collected near where the plume exited the glacial front revealed a low-frequency seismic tremor signal that lasted 8.5 hours during the drainage of the lake.
After applying all the classical signal-processing methods commonly applied in oceanographic, statistical, and seismic analyses, I realized we needed a radically different approach to comprehend the subsurface water pressure, salinity, and temperature data from within the plume.
The time series of these oceanographic data started to remind me of the nonlinear cardiograms I used to see at home when I was younger, courtesy of my mother, a cardiologist. The heart and many other dynamical systems can generate irregular and chaotic patterns of behavior even from totally deterministic behavior, without requiring any random, or stochastic, fluctuations in the system. In our case, the irregularities in the data came from the occasional turbulence caused by the plume and by icebergs, which repeatedly pushed the sensors through different water masses.
There are many linear methods that can be used to understand the evolution of time series. For example, the well-known Fourier transform mathematically converts time domain data to the frequency domain. But such methods neither statistically characterize the observed dynamics of a system nor detect the existence of so-called attractors (states to which a system tends to converge or return, like a pendulum that eventually comes to rest at the center of its arcing swings)—both capabilities we needed to make sense of our complex data. Mapping different states (i.e., water masses) visited by moving sensors collecting scalar, or point, measurements required us to move beyond linear analytical methods.
In the artillery of nonlinear methods, there is a technique called time delay embedding, which projects data from the time domain to the state space domain [Takens, 1981]. This technique reveals structure in a system graphically by using delay coordinates, which combine sequential scalar measurements in a time series, with each measurement separated by a designated time interval (the delay time), into multidimensional vectors. This technique helps reveal attractors and identify transitions in a time series (e.g., distinguishing between signals from the lake water and the fjord water). We applied this (almost) magical approach in combination with other, more conventional methods to decipher our oceanographic records and comprehend the observed dynamics of the plume [Podolskiy et al., 2021a].
New Discoveries and Problems Still to Solve
Our analyses revealed previously undocumented high-frequency dynamics in the glacier-fjord environment. These dynamics extended well beyond anything we had imagined, and they could be important for understanding submarine melting, water mixing, and circulation, as well as biogeochemistry near glacial termini. For example, sudden stratification shifts may imply the descent of a cold water layer and the corresponding thickening of a warmer layer near the surface as well as the occurrence of enhanced melting that undercuts ice cliffs and leads to calving.
Observed ripples in the water surface and detected seismicity may offer innovative ways to monitor abrupt, large discharge events even when there is no surface expression of the plume. These events may occur more often in the future as surface waters increasingly freshen (and become less dense), thereby blocking plumes from reaching the surface [De Andrés et al., 2020]. Also, the tidal modulation of water properties, such as temperature, that we found highlights that there are still processes not accounted for in models estimating submarine glacial melting in Greenland.
Our work shows that we may need to rethink how we model and monitor discharge plumes.
Previous efforts to study this melting were limited to providing episodic views of the ice–ocean interface and have not monitored the ocean and glacier simultaneously. Our first-of-their-kind observations could thus be informative for constraining predictive ice-ocean models. Abrupt stratification changes in a fjord, the intermittent nature of glacial plumes, tidal forcing, and sudden drainages of marginal lakes are all very complex processes to model. It is possible these processes could be parameterized to make modeling them easier or even ignored if they’re found to be insignificant in long-term predictions of ice–ocean interactions. Nevertheless, our work shows that we may need to rethink how we model and monitor discharge plumes to obtain clarity on these processes, particularly on short timescales.
Our analyses may be helpful for interpreting future records of glacial discharge and other phenomena. The methods developed and applied here are not necessarily limited to oceanography because deciphering time series is an ever-present task across the geosciences. On the other hand, our novel and customized observational approach was challenging and is suited for only short-term campaigns. We hope that ongoing developments in sea bottom lander technology and remotely operated deployments at calving fronts [e.g., Nash et al., 2020; Podolskiy et al., 2021b] will pave the way for continuous, year-round observations in these critical environments, providing further insights to help scientists understand the effects of increasing glacial melting on ocean dynamics and marine ecosystems.
Acknowledgments
This work was part of Arctic Challenge for Sustainability research projects (ArCS and ArCS II; grants JPMXD1300000000 and JPMXD1420318865, respectively) funded by the Ministry of Education, Culture, Sports, Science and Technology of Japan.
References
De Andrés, E., et al. (2020), Surface emergence of glacial plumes determined by fjord stratification, Cryosphere, 14, 1,951–1,969, https://doi.org/10.5194/tc-14-1951-2020.
Kanna, N., et al. (2018), Upwelling of macronutrients and dissolved inorganic carbon by a subglacial freshwater driven plume in Bowdoin Fjord, northwestern Greenland, J. Geophys. Res. Biogeosci., 123, 1,666–1,682, https://doi.org/10.1029/2017JG004248.
Kanna, N., et al. (2020), Iron supply by subglacial discharge into a fjord near the front of a marine-terminating glacier in northwestern Greenland, Global Biogeochem. Cycles, 34, e2020GB006567, https://doi.org/10.1029/2020GB006567.
Nash, J., E. Pettit, and P. Spain (2020), ADCPS aid pioneering study of how glaciers melt, Environ. Coastal Offshore, Polar 2020 special issue, 104–107, digital.ecomagazine.com/publication/frame.php?i=674747&p=&pn=&ver=html5.
Podolskiy, E. A., N. Kanna, and S. Sugiyama (2021a), Co-seismic eruption and intermittent turbulence of a subglacial discharge plume revealed by continuous subsurface observations in Greenland, Commun. Earth Environ., 2, 66, https://doi.org/10.1038/s43247-021-00132-8.
Podolskiy, E. A., et al. (2021b), Ocean-bottom seismology of glacial earthquakes: The concept, lessons learned, and mind the sediments, Seismol. Res. Lett., https://doi.org/10.1785/0220200465.
Straneo, F., et al. (2019), The case for a sustained Greenland Ice Sheet-ocean observing system (GrIOOS), Front. Mar. Sci., 6(138), 1–23, https://doi.org/10.3389/fmars.2019.00138.
Takens, F. (1981), Detecting strange attractors in turbulence, in Dynamical Systems and Turbulence, Warwick 1980, Lect. Notes Math., vol. 898, edited by D. Rand and L. Young, pp. 366–381, Springer, Berlin, https://doi.org/10.1007/BFb0091924.
van Dongen, E. C. H., et al. (2021), Thinning leads to calving-style changes at Bowdoin Glacier, Greenland, Cryosphere, 15, 485–500, https://doi.org/10.5194/tc-15-485-2021.
Author Information
Evgeny A. Podolskiy ([email protected]), Arctic Research Center, Hokkaido University, Sapporo, Japan
Citation:
Podolskiy, E. A. (2021), Undertaking adventure to make sense of subglacial plumes, Eos, 102, https://doi.org/10.1029/2021EO162045. Published on 18 August 2021.
Text © 2021. The authors. CC BY-NC-ND 3.0
Except where otherwise noted, images are subject to copyright. Any reuse without express permission from the copyright owner is prohibited.