In late December 2004, a magnitude 9.2 earthquake near Sumatra caused a tsunami that rippled across the Indian Ocean and devastated coastal stretches of Indonesia, Sri Lanka, India, and elsewhere. Other sizable tsunamis have followed since, including the deadly magnitude 9.1 Tohoku earthquake-generated event in 2011 that inundated Japan’s Pacific coast, as well as the tsunami triggered this past January by the eruption of the Hunga Tonga–Hunga Ha‘apai (HTHH) volcano in the South Pacific nation of Tonga.
Today more than 700 million people living in coastal areas are at risk from tsunamis and other extreme events like severe storm surges. And this number is likely to grow as coastal populations and oceans rise.
Advance warning of impending hazards is the most critical factor in saving people and resources—the more lead time, the more opportunity people have to evacuate and to safeguard critical infrastructure. Thankfully, the impacts of tsunamis can be forecast given the waves’ relatively slow velocities (compared to, say, seismic waves) and that their propagation across the ocean can be tracked and projected. But the quality and advance timing of tsunami forecasts rely on the capabilities of sparse instruments like ocean buoys and tide gauges on Earth’s surface. To increase the warning lead times for tsunamis, we suggest a disruptive idea for how to identify geohazards better and faster than current ground-based systems can.
The new solution we propose is based on low-cost satellite technology with a high technology readiness level that can be built and co-operated by global stakeholders. Specifically, we can use dense intersatellite links between Global Navigation Satellite System (GNSS) satellites and constellations of nanosatellites (also called CubeSats) to convert the atmosphere into a global sensing system for rapid detection of geohazard and extreme weather events, advanced early warnings, and disaster risk reduction.
Early Warnings from Atmospheric Waves
Tsunamis are often triggered by earthquakes or volcanic eruptions, many of which produce atmospheric effects that satellites can easily detect.
How can orbiting satellites detect a tsunami that is just beginning to propagate? These giant waves are often triggered by earthquakes or volcanic eruptions, many of which produce atmospheric effects that satellites can easily detect. For example, the recent volcanic activity at HTHH occurred as a series of events, with the most violent eruption taking place at around 04:26 UTC on 15 January 2022. The explosion ejected a volcanic plume that reached into the mesosphere (>50-kilometer altitude) and spread ash widely over distances of several hundred kilometers.
Satellite-detected atmospheric (Lamb) waves from the event propagated around the world three to four times, and about 9 hours after the eruption, residents of Alaska, some 9,000 kilometers away, heard the sonic boom. Barometric stations worldwide, including throughout the Australian continent, also recorded the Lamb waves, which propagated at about 315 meters per second and had pressure wave amplitudes of a few hectopascals [Amores et al., 2022; Matoza et al., 2022].
The coupling of these atmospheric waves to the oceanic basins resulted in sea level fluctuations observed much earlier than the tsunami waves themselves [Omira et al., 2022]. For example, the tide gauge at Lord Howe Island, located off Australia’s eastern coast and about 3,000 kilometers southwest of the eruption site, recorded an initial sea level fluctuation of 0.1 meter about 2.5 hours after the eruption, followed by much larger waves of up to 1 meter when the tsunami, traveling roughly 200 meters per second, arrived another 2 hours later. Such observations were initially enigmatic but now are understood as resulting from the atmospheric pressure wave [Kubota et al., 2022].
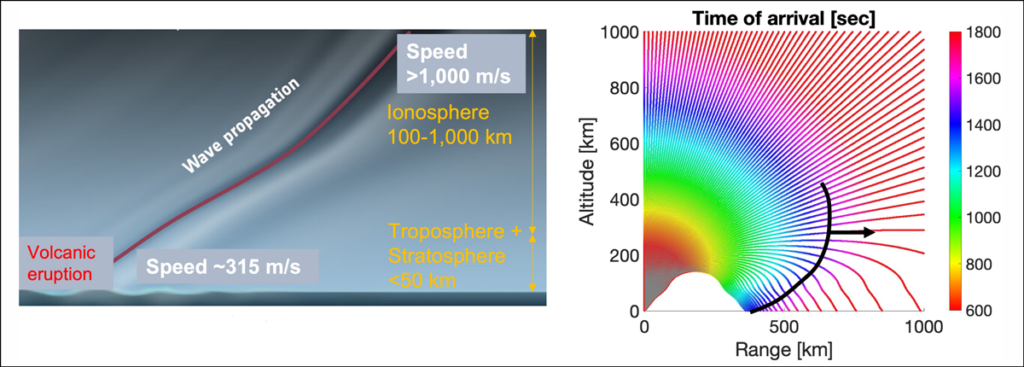
The HTHH event and subsequent atmospheric and oceanic observations have reinvigorated interest in the idea of monitoring the atmosphere for signs of ground events. Atmospheric acoustic waves travel faster than tsunamis—about 315 meters per second at the surface and more than 1,000 meters per second at 500-kilometer altitude (Figure 1). Waves generated by extreme events such as volcanic eruptions and tsunamis penetrate the troposphere and stratosphere (roughly the bottom 50 kilometers of the atmosphere) and reach all the way to the ionosphere (100–1,000 kilometers). There, these waves produce traveling ionospheric disturbances (TIDs) by perturbing the plasma of ambient electrons [Dautermann et al., 2009].
Observations of TIDs have been commonly reported after volcanic eruptions, tsunamis, earthquakes, storms, and even human-made signals like large explosions [Komjathy et al., 2016]. The upper atmosphere is also an ideal place to detect anomalies associated with these extreme events because the amplitudes of atmospheric perturbations increase dramatically with altitude. This increase occurs because the density of air exponentially decreases at higher altitudes, leading to larger fluctuations in accordance with the law of energy conservation [Hines, 1960]. For example, a tsunami with a 30-centimeter wave height on the open seas induces a kilometer-scale oscillation in the ionosphere at an altitude of 100 kilometers [Astafyeva, 2019].
Because atmospheric waves travel faster than ocean waves, they can be detected in the atmosphere before potentially damaging hazards like tsunamis are detected or cause damage on the ground.
Because these atmospheric waves travel faster than ocean waves, TIDs can be detected in the atmosphere before potentially damaging hazards like tsunamis are detected or cause damage on the ground. Sensing these atmospheric disturbances is thus a way to improve warning times ahead of an impending tsunami. The fact that atmospheric waves propagate along great circles (the shortest point-to-point route on a spherical surface), whereas tsunamis must detour around landmasses, offers potential for even more advance warning and is another advantage of atmospheric detection.
Using Spaceborne Sensors
Our proposed method for atmospheric sensing of disturbances would use measurements from a globally distributed constellation of numerous CubeSats (ideally, in the hundreds) detecting signals from the roughly 100 GNSS satellites currently operating (including those in the GPS, GLONASS (Global Navigation Satellite System), Galileo, and BeiDou constellations). These GNSS satellites, orbiting at about 20,000 kilometers in altitude, act as artificial radio sources transmitting at L band frequencies of 1–2 gigahertz. The L band radio signals penetrate and refract within the atmosphere below before reaching receivers on satellites orbiting at lower altitudes, such as those in low Earth orbit (LEO; about 350–800 kilometers), or receivers at ground stations.
Atmospheric parameters such as temperature, moisture, and electron content can be mapped by detecting atmospheric refraction of the GNSS L band radio signals. With a constellation of the orbiting CubeSats collecting GNSS data, the extent that extreme events perturb these parameters over space and time can also be measured.
Ground-based GNSS receivers can measure TIDs associated with extreme events, such as earthquakes [e.g., Heki et al., 2006] and tsunamis [e.g., Rakoto et al., 2018], so why do we need CubeSats? The high-altitude GNSS satellites orbit slowly, so their geometry with respect to ground stations remains relatively constant, and the ionosphere pierce point (where GNSS radio signals encounter the peak electron density in the ionosphere, roughly 300 kilometers above the ground) is almost stationary. Also, a ground-based GNSS station detects atmospheric perturbations as they sweep by above the station, but it cannot detect much about what is happening at distant locations—for example, atmospheric perturbations over the ocean related to incoming tsunami waves. In contrast, CubeSats continuously orbit in LEO at a speed of 7–8 kilometers per second, detecting atmospheric perturbations (i.e., TIDs) above land and ocean. In other words, a single CubeSat equipped with a GNSS receiver can sample widely different regions, whereas a ground station covers only its immediate vicinity.
Measurements from many CubeSats combined can offer substantially richer information about atmospheric perturbations, which will be useful to detect events more quickly.
Measurements from many CubeSats combined can therefore offer substantially richer (i.e., having wider coverage, higher resolution, and greater speed) information about atmospheric perturbations, which will be useful to detect the events more quickly and better characterize and constrain their sources. Low-inclination Sun-synchronous orbits would be most useful, allowing for improved repeat passes covering most of the oceans and low-latitude regions, although these would ideally be complemented by polar-orbiting CubeSats to extend coverage.
Putting the Technique to the Test
To test our proposed method’s technical viability, we have begun exploring GNSS tracking data from commercial CubeSats operated by Spire Global Inc. [Han et al., 2021]. For example, we have processed data collected following the 15 January HTHH volcanic eruption using techniques developed to process data from ground-based receivers, focusing initially on the position and timing of resulting atmospheric and tsunami waves with respect to Australia.
Figure 2 shows the position of an atmospheric Lamb wave relative to the position of the tsunami wavefront during two different time windows (roughly 3–4 and 6–7 hours) after the eruption from CubeSat GNSS measurements of the ionospheric electron density perturbation (i.e., TID) caused by the eruption. Time series of total electron content measurements along the CubeSat’s trajectory show that the TID from the Lamb wave was clearly measured in both time windows and that the timings of its onset and demise coincided with when the CubeSat entered and left the domain of the atmospheric perturbation. These measurements of the TID indicate essentially when and where the perturbation occurred after the volcanic eruption, findings that are important for determining the explosive source of the tsunami and for predicting the tsunami’s propagation and impacts.
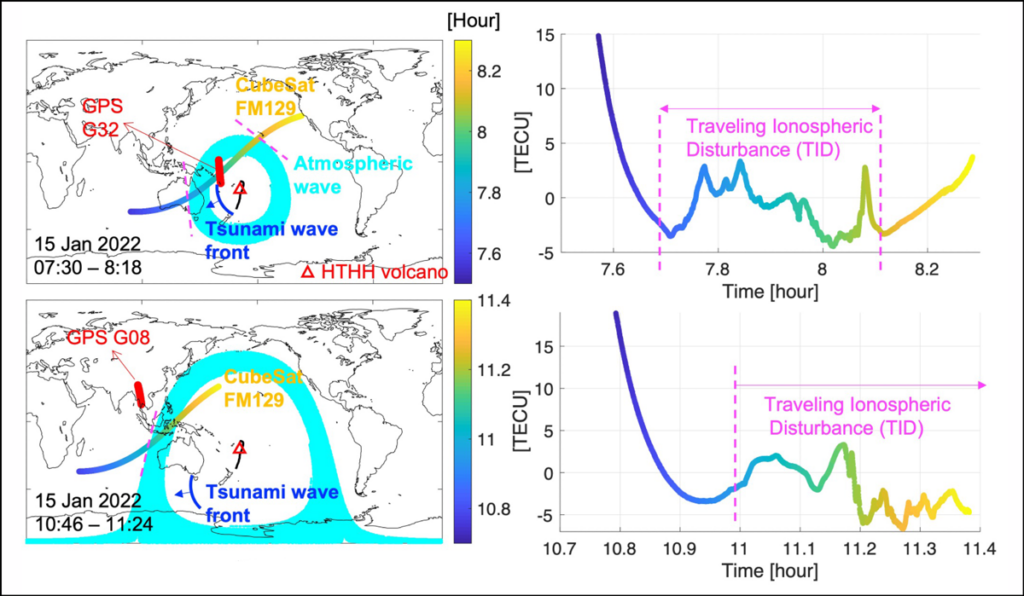
During the first time window (Figure 2, top) of the CubeSat TID measurements, the tsunami was still in the open ocean, well before it made landfall. At the time of TID detection from the orbit, the wavefront of the tsunami was still 1–1.5 hours away from the eastern coast of Australia, giving a sense of the advanced warning that this method could have provided to residents there.
Roughly 3 hours later at 11:00 UTC, the same CubeSat detected the atmospheric Lamb wave again (Figure 2, bottom). By this time, it had propagated farther and passed Perth, Western Australia, whereas the tsunami wavefront had just passed Tasmania and would take an additional 3–4 hours to reach Perth. These examples demonstrate that the CubeSat detected the atmospheric perturbation before the tsunami arrived at the eastern and western coasts of Australia, by a few hours in each case.
Tiny Satellites Are Mighty Together
The recent paradigm shift in space technology toward miniaturized sensors, smaller spacecraft, and more affordable launches is opening an unprecedented level of accessibility to data collection from space-based platforms. The technology sector has realized the concept of operating numerous small satellites with science payloads for spatially and temporally dense in situ data collection. And researchers are already building their own CubeSats—with GNSS receivers routinely integrated—and launching them through commercial providers or government programs (e.g., NASA’s CubeSat Launch Initiative).
Information from these platforms is becoming increasingly reliable and relevant not only to the scientific community but also to the public, for example, for rapid flood detection. At the same time, CubeSat platforms are increasingly affordable to build and deploy. With a budget of about $100,000, one can build a 2U- or even 3U-sized CubeSat (1U = 10 × 10 × 10 centimeters) with a GNSS receiver, onboard computer, power, and communication system. Another $100,000 or so can put the CubeSat into orbit (a figure that drops on a per instrument basis when “ride sharing,” or launching multiple satellites simultaneously).
A network of orbiting Global Navigation Satellite System (GNSS) receiver-equipped CubeSats is the ideal companion to the existing ground-based geohazard monitoring GNSS network.
A direct comparison of costs to build, deploy, and maintain a CubeSat constellation for extreme event monitoring with those of existing monitoring networks (e.g., using ocean buoys) is difficult because cost estimates vary and there are many other factors involved beyond the instruments themselves. But we expect that a constellation of CubeSats would compare favorably, especially considering the improved coverage, resolution, and speed of detection it would offer, and that its use for geohazard monitoring could be piggybacked onto satellites deployed for other primary missions. Such a network of orbiting GNSS receiver-equipped CubeSats is also the ideal companion to the existing ground-based geohazard monitoring GNSS network.
Now is the time to co-organize an international CubeSat geohazard program to advance our capability to use this affordable technology. As first priorities, this program should set up a protocol for building CubeSats based on minimum hardware requirements for geohazard monitoring, coordinate near-real-time data downlinks from CubeSats to ground stations internationally, organize archiving and analysis centers for data collected, and develop data analysis techniques and open-source software.
We further call for international participation to initiate an intergovernmental effort to implement a real-time system for geohazard monitoring based on small satellites. Such a system could provide identification and warnings of extreme events like tsunamis, volcanic eruptions, earthquakes, large storms, and even human-made explosions earlier than what is possible with current systems. And this additional time to react could ultimately mean more lives and infrastructure saved when these events strike communities around the world.
Acknowledgments
This work was funded by the Australian Research Council Discovery Program (DP170100224). The authorized access to Spire Global’s data was granted via NASA’s Commercial Smallsat Data Acquisition Program. Spire Global’s Orbit and GNSS team and Vu Nguyen are acknowledged for their support and knowledge sharing for our analysis of their CubeSat GNSS data. Discussion with Emile Okal, Lucie Rolland, and Craig Benson helped to develop this concept and opinion. This paper is published with the permission of the CEO, Geoscience Australia.
References
Amores, A., et al. (2022), Numerical simulation of atmospheric Lamb waves generated by the 2022 Hunga-Tonga volcanic eruption, Geophys. Res. Lett., 49, e2022GL098240, https://doi.org/10.1029/2022GL098240.
Astafyeva, E. (2019), Ionospheric detection of natural hazards, Rev. Geophys., 57, 1,265–1,288, https://doi.org/10.1029/2019RG000668.
Dautermann, T., E. Calais, and G. S. Mattioli (2009), Global Positioning System detection and energy estimation of the ionospheric wave caused by the 13 July 2003 explosion of the Soufrière Hills Volcano, Montserrat, J. Geophys. Res. Solid Earth, 114, B02202, https://doi.org/10.1029/2008JB005722.
Han, S.-C., et al. (2021), A constellation of nanosatellites for geodesy, space weather and radio occultation experiment: An Australian example from Spire Global CubeSats, paper presented at 43rd COSPAR Scientific Assembly, Sydney, N. S. W., Australia, 28 Jan. to 4 Feb.
Heki, K., et al. (2006), Detection of ruptures of Andaman fault segments in the 2004 great Sumatra earthquake with coseismic ionospheric disturbances, J. Geophys. Res. Solid Earth, 111, B09313, https://doi.org/10.1029/2005JB004202.
Hines, C. O. (1960), Internal atmospheric gravity waves at ionospheric heights, Can. J. Phys., 38(11), 1,441–1,481, https://doi.org/10.1139/p60-150.
Komjathy, A., et al. (2016), Review and perspectives: Understanding natural-hazards-generated ionospheric perturbations using GPS measurements and coupled modeling, Radio Sci., 51, 951–961, https://doi.org/10.1002/2015RS005910.
Kubota, T., T. Saito, and K. Nishida (2022), Global fast-traveling tsunamis driven by atmospheric Lamb waves on the 2022 Tonga eruption, Science, 377, 91–94, https://doi.org/10.1126/science.abo4364.
Matoza, R. S., et al. (2022), Atmospheric waves and global seismoacoustic observations of the January 2022 Hunga eruption, Tonga, Science, 377, 95–100, https://doi.org/10.1126/science.abo7063.
Omira, R., et al. (2022), Global Tonga tsunami explained by a fast-moving atmospheric source, Nature, 609, 734–740, https://doi.org/10.1038/s41586-022-04926-4.
Rakoto, V., et al. (2018), Tsunami wave height estimation from GPS-derived ionospheric data, J. Geophys. Res. Space Physics, 123, 4,329–4,348, https://doi.org/10.1002/2017JA024654.
Author Information
Shin-Chan Han ([email protected]), University of Newcastle, Callaghan, N. S. W., Australia; Simon McClusky, Geoscience Australia, Symonston, A. C. T.; T. Dylan Mikesell, Norwegian Geotechnical Institute, Oslo; Paul Tregoning, Australian National University, Canberra; and Jeanne Sauber, NASA Sciences and Exploration Directorate, NASA Goddard Space Flight Center, Greenbelt, Md.